



Our team NimbRo won the RoboCup 2022 Humanoid League
AdultSize soccer competition in
Bangkok, Tailand. Our robots also won the Drop-in tournament and the Technical Challenges. Consequently,
our team came in first in the overall Best-Humanoid
ranking. [Press Release]



Our team NimbRo won the RoboCup 2019 Humanoid
League AdultSize soccer
competition in Sydney, Australia.
Our robots also won the Drop-in
tournament and the Technical
Challenges. Consequently, our team came in first in the overall Best-Humanoid ranking. [Press
release]
Download: RoboCup_2019_Humanoid_League_AdultSize_Winner_NimbRo.mp4



Our team NimbRo won the RoboCup 2018 Humanoid
League AdultSize soccer
competition in Montreal, Canada.
Our robots also won the Drop-in
tournament and the Technical
Challenges. Consequently, our team came in first in the overall Best-Humanoid ranking. [Press release]
RoboCup_2018_Humanoid_AdultSize_Soccer_Winner_NimbRo.mp4



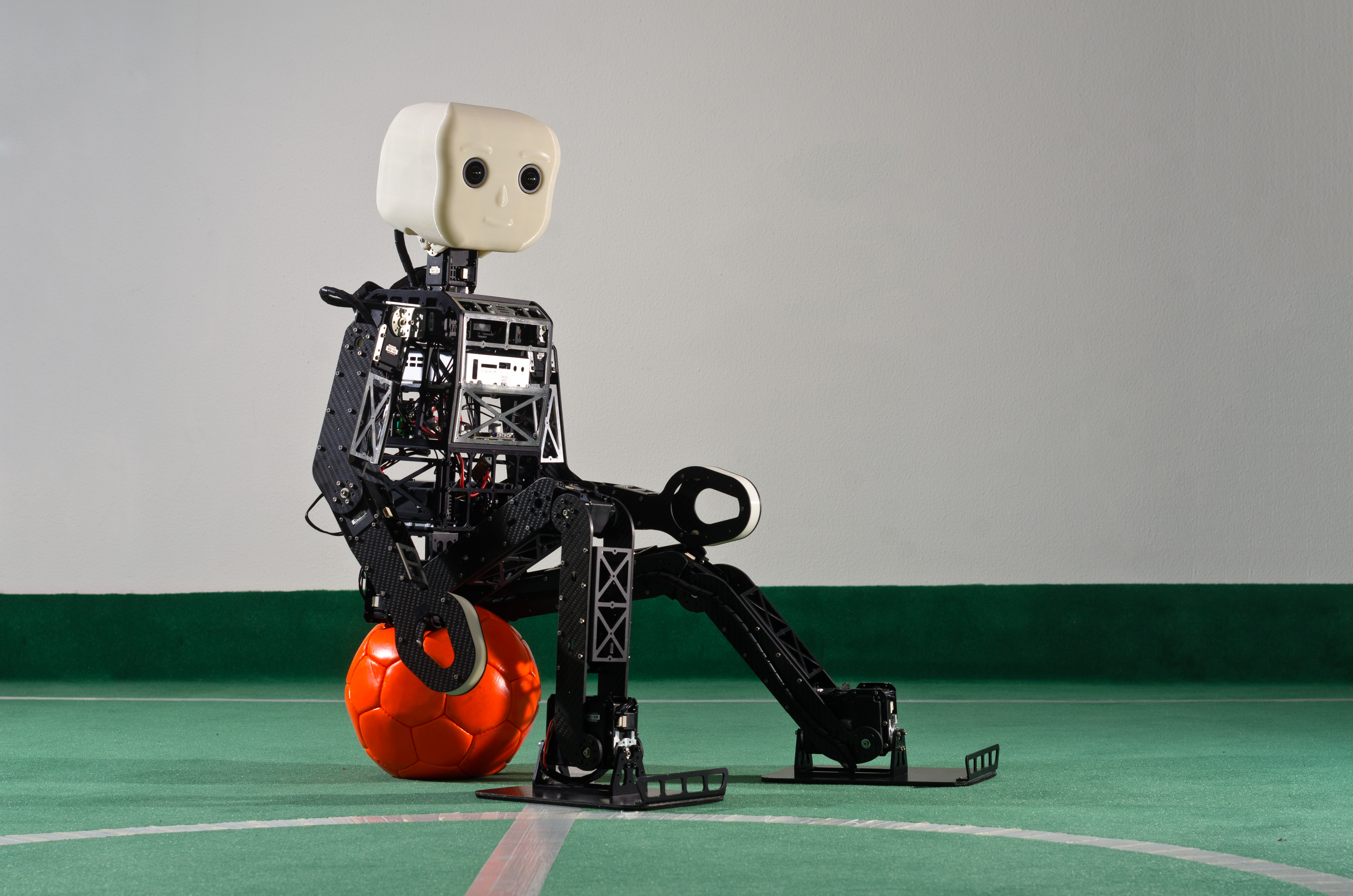
In the AdultSize class, for the first time 1 vs. 1 soccer games were played. The new NimbRo-OP2 robot played very well, scoring 46:1 goals in five games. In TeenSize, the number of players was increased to 3 vs. 3. Our robots scored 27:0 goals in seven games.


")
The price was awarded at RoboCup 2016 in Leipzig.

Together with the refurbished Dynaped, who was also running the ROS-based software, the igus® Humanoid Open Platform robots scored 29:0 goals in five games.





22.7.2015
Our Team NimbRo TeenSize participated in the RoboCup 2015 Competition
in Hefei, China.
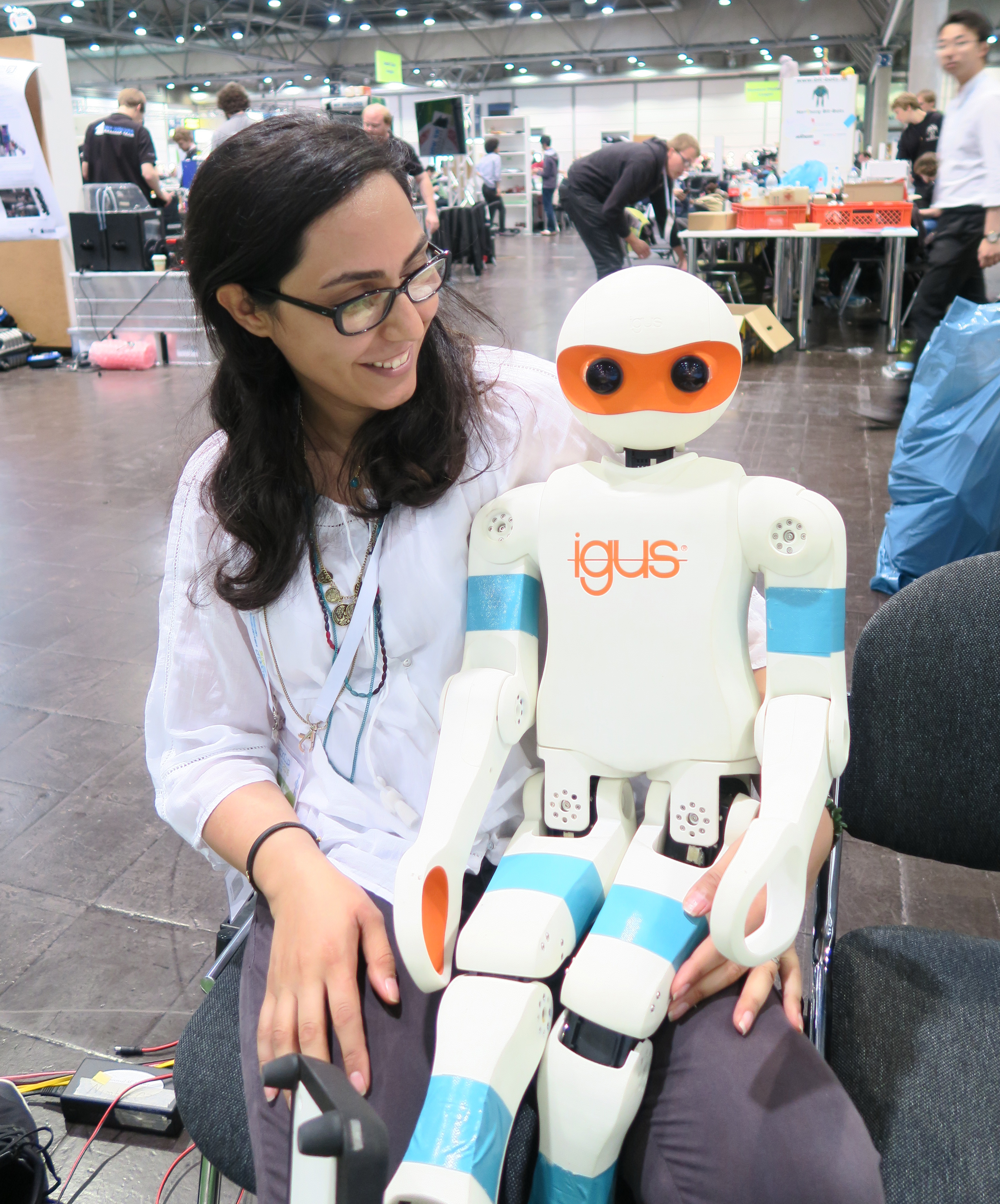
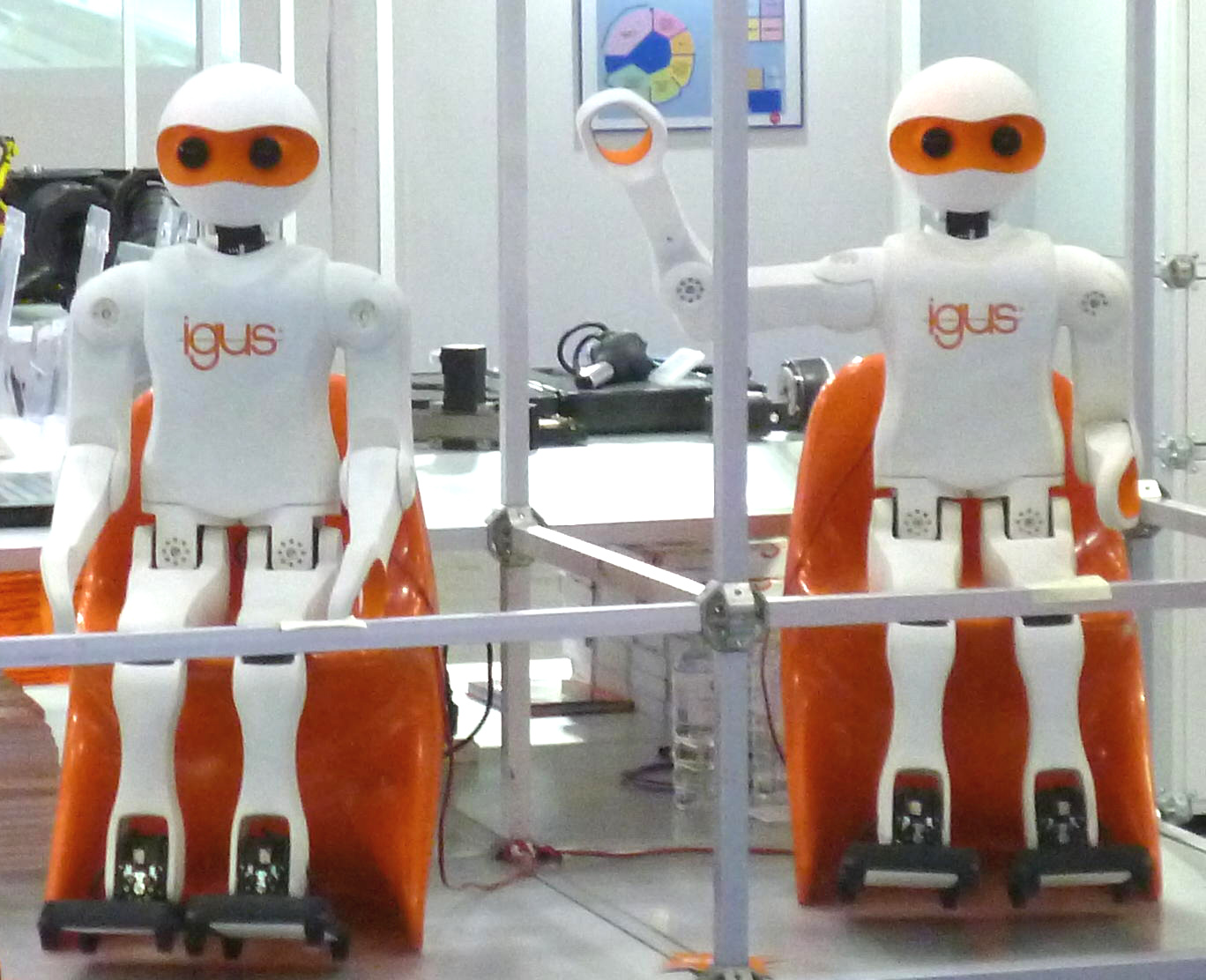
The igus®
Humanoid Open Platform
robot, which we develop together with igus® GmbH, won the first RoboCup
Design Award.



The robot PC can run Linux or Windows.
We developed a ROS-based software framework for the robot providing functionality for hardware abstraction, visual perception, and behavior generation. The framework has been used to implement basic soccer skills.
Please contact Martin Raak of igus® GmbH for pricing on the
complete set of 3D printed parts of the igus® Humanoid Open Platform: Contact
form
Please discuss all questions related to robot at
RobotSource.org
.
Dmytro Pavlichenko, Grzegorz Ficht, Arash Amini, Mojtaba
Hosseini,
Raphael Memmesheimer, Angel Villar-Corrales, Stefan M. Schulz, Marcell
Missura, Maren Bennewitz, and Sven Behnke:
RoboCup 2022
AdultSize Winner NimbRo: Upgraded Perception, Capture Steps Gait and
Phase-based In-walk Kicks
Accepted for RoboCup 2022: Robot World Cup XXV, LNCS 13561, Springer, to
appear May 2023.
Grzegorz Ficht and Sven Behnke:
Direct Centroidal Control for
Balanced Humanoid Locomotion
In Proceedings of 25th International Conference on Climbing and Walking Robots
(CLAWAR), Ponta Delgada, Azores, Portugal, September 2022.
Runner-up Best Technical Paper Award.
[Video]
Andre Brandenburger, Diego Rodriguez, and Sven Behnke:
Mapless Humanoid Navigation Using
Learned Latent Dynamics
In Proceedings of IEEE/RSJ International Conference on Intelligent
Robots
and Systems (IROS), Prague, Czech Republic, September 2021.
[Video]
Grzegorz Ficht and Sven Behnke:
Bipedal Humanoid Hardware Design:
A Technology Review
Current Robotics Reports 2, 201–210, Springer, 2021.
Grzegorz Ficht, Hafez Farazi, Diego Rodriguez, Dmytro Pavlichenko,
Philipp Allgeuer, André Brandenburger,
and Sven Behnke
NimbRo-OP2X: Affordable
Adult-sized 3D-printed Open-Source Humanoid Robot for Research
International Journal of Humanoid Robotics (IJHR), vol. 17, no. 05, 2050021, 2020.
Grzegorz Ficht and Sven Behnke :
Fast Whole-Body
Motion Control of Humanoid Robots with Inertia Constraints
In Proceedings of IEEE International Conference on Robotics and
Automation
(ICRA), Paris, France, May 2020.
[Video]
Marcell Missura, Maren Bennewitz, and Sven Behnke:
Capture Steps:
Robust Walking for Humanoid Robots
International Journal of Humanoid Robotics (IJHR)
16(6):1950032:1-1950032:28, World Scientific, 2019.
[Video]
Diego Rodriguez, Hafez Farazi, Grzegorz Ficht, Dmytro
Pavlichenko, André Brandenburger, Mojtaba Hosseini, Oleg Kosenko,
Michael Schreiber, Marcel Missura, and Sven Behnke:
RoboCup 2019 AdultSize
Winner NimbRo: Deep Learning Perception, In-Walk Kick, Push Recovery,
and Team Play Capabilities
In: RoboCup 2019, Robot World Cup XXIII. LNCS 11531, pp. 631-645,
Springer, 2019.
Hafez Farazi, Grzegorz Ficht, Philipp Allgeuer, Dmytro
Pavlichenko, Diego
Rodriguez, André Brandenburger, Mojtaba Hosseini, and Sven Behnke:
NimbRo Robots
Winning RoboCup 2018 Humanoid AdultSize Soccer Competitions
In: RoboCup 2018: Robot World Cup XXII. LNCS 11374, pp 436-449.
Springer, 2019.
Diego Rodriguez, Hafez Farazi, Grzegorz Ficht, Dmytro Pavlichenko,
Andre Brandenburger, Mojtaba Hosseini and Sven Behnke
NimbRo
AdultSize Team Description Paper 2019
In RoboCup Humanoid League Team Descriptions, Sydney, Australia, July
2019
Grzegorz Ficht, Hafez Farazi, Andre Brandenburger, Diego
Rodriguez,
Dmytro Pavlichenko, Philipp Allgeuer, Mojtaba Hosseini, and Sven Behnke:
NimbRo-OP2X:
Adult-sized Open-source 3D Printed Humanoid Robot
In Proceedings of IEEE-RAS 18th International Conference on Humanoid
Robots
(Humanoids), Beijing, China, November 2018.
[Hardware]
[Software]
Grzegorz Ficht and Sven Behnke:
Online Balanced
Motion Generation for Humanoid Robots
In Proceedings of IEEE-RAS 18th International Conference on Humanoid
Robots
(Humanoids), Beijing, China, November 2018.
Philipp Allgeuer and Sven Behnke:
Bipedal Walking
with Corrective Actions in the Tilt Phase Space
In Proceedings of IEEE-RAS 18th International Conference on Humanoid
Robots
(Humanoids), Beijing, China, November 2018.
Philipp Allgeuer and Sven Behnke:
Tilt Rotations
and the Tilt Phase Space
In Proceedings of IEEE-RAS 18th International Conference on Humanoid
Robots
(Humanoids), Beijing, China, November 2018.
Diego Rodriguez, André Brandenburger, and Sven Behnke:
Combining Simulations
and Real-robot Experiments for Bayesian Optimization of Bipedal Gait
Stabilization
In Proceedings of 22nd RoboCup International Symposium, Montreal,
Canada, June 2018.
Grzegorz Ficht, Dmytro Pavlichenko, Philipp Allgeuer, Hafez
Farazi, Diego
Rodriguez, André Brandenburger, Johannes Kürsch, Michael Schreiber, and
Sven Behnke:
Grown-up
NimbRo Robots Winning RoboCup
2017 Humanoid AdultSize Soccer Competitions
In RoboCup 2017: Robot World Cup XXI, LNCS 11175, pp. 448-460,
Springer, 2018.
Diego Rodriguez, Hafez Farazi, Philipp Allgeuer, Grzegorz
Ficht, Dmytro
Pavlichenko, André Brandenburger, Johannes Kürsch, and Sven Behnke:
Advanced Soccer Skills
and Team Play of RoboCup 2017 TeenSize Winner NimbRo
In RoboCup 2017: Robot World Cup XXI, LNCS 11175, pp. 435-447,
Springer, 2018.
Grzegorz Ficht, Philipp Allgeuer, Hafez Farazi, and Sven
Behnke:
NimbRo-OP2: Grown-up 3D
Printed Open Humanoid Platform for Research
In Proceedings of IEEE-RAS International Conference on Humanoid Robots
(Humanoids), Birmingham, UK, November 2017.
[Video]
[CAD
Release] [Software]
Hafez Farazi and Sven Behnke:
Online Visual
Robot Tracking and Identification using Deep LSTM Networks
In Proceedings of IEEE/RSJ International Conference on Intelligent
Robots
and Systems (IROS), Vancouver, Canada, September 2017.
RoboCup Best Paper Award.
[Video]
Hafez Farazi, Philipp Allgeuer, Grzegorz Ficht, André
Brandenburger,
Dmytro Pavlichenko, Michael Schreiber, and Sven Behnke:
RoboCup 2016 Humanoid
TeenSize Winner NimbRo: Robust Visual
Perception and Soccer Behaviors
In: RoboCup 2016: Robot World Cup XX, LNCS 9776, pp. 478-490, Springer,
2017.
Philipp Allgeuer, Grzegorz Ficht, Hafez Farazi, Michael
Schreiber, and Sven Behnke:
First International
HARTING Open Source Prize Winner: The igus Humanoid Open Platform
In: RoboCup 2016: Robot World Cup XX, LNCS 9776, pp. 625-633,
Springer, 2017.
Philipp Allgeuer and Sven Behnke:
Omnidirectional
Bipedal Walking with Direct Fused Angle Feedback Mechanisms
In Proceedings of IEEE-RAS International Conference on Humanoid Robots
(Humanoids), Cancun, Mexico, November 2016.
[Video]
Philipp Allgeuer, Hafez Farazi, Grzegorz Ficht, Michael
Schreiber, and Sven Behnke:
The igus Humanoid Open
Platform: A Child-sized 3D Printed
Open-Source Robot for Research
German Journal on Artificial Intelligence (KI), volume 30, issue 3-4,
pp. 315-319, 2016.
Hafez Farazi and Sven Behnke:
Real-Time Visual
Tracking and Identification for a Team of Homogeneous
Humanoid Robots
In Proceedings of 20th RoboCup International Symposium, Leipzig,
Germany, July 2016.
Philipp Allgeuer, Hafez Farazi, Michael Schreiber, and Sven
Behnke:
Child-sized 3D
Printed igus Humanoid Open Platform
In Proceedings of IEEE-RAS International Conference on Humanoid Robots
(Humanoids), Seoul, Korea, November 2015.
Hafez Farazi, Philipp Allgeuer, and Sven Behnke:
A Monocular Vision
System for Playing Soccer in Low Color Information Environments
In
Proceedings of 10th Workshop on Humanoid Soccer Robots,
IEEE-RAS
International Conference on Humanoid Robots (Humanoids), Seoul, Korea,
November 2015.
Philipp Allgeuer and Sven Behnke:
Fused Angles: A
Representation of Body Orientation for Balance
In Proceedings of IEEE/RSJ International Conference on Intelligent
Robots and Systems
(IROS), Hamburg, Germany, September 2015.
Philipp Allgeuer, Marcell Missura and Sven Behnke:
NimbRo TeenSize Team
Description 2015
In: RoboCup Humanoid League Team Descriptions, Hefei,
China, July 2015.
Philipp Allgeuer and Sven Behnke:
Robust Sensor Fusion
for Robot Attitude Estimation
In Proceedings of 14th IEEE-RAS International Conference on Humanoid
Robots (Humanoids), Madrid, Spain, November 2014.[Source
code]
Philipp Allgeuer and Sven Behnke:
Fused
Angles for Body Orientation Representation
In Proceedings of 9th Workshop on Humanoid Soccer Robots,14th IEEE-RAS
International Conference on Humanoid
Robots (Humanoids), Madrid, Spain, November 2014. [Source
code]
Marcell Missura, Philipp Allgeuer, Michael Schreiber, Cedrick
Münstermann, Max Schwarz, Sebastian Schueller, and Sven Behnke
NimbRo TeenSize 2014
Team Description
In: RoboCup Humanoid League Team Descriptions, Joao Pessoa, July 2014.
Philipp Allgeuer, Max Schwarz, Julio Pastrana, Sebastian
Schueller, Marcell Missura and Sven Behnke:
A
ROS-based Software Framework for the NimbRo-OP Humanoid Open Platform
In Proceedings of 8th Workshop on Humanoid Soccer Robots,
IEEE-RAS International Conference on Humanoid Robots (Humanoids),
Atlanta, October
2013.
Philipp Allgeuer and Sven Behnke:
Hierarchical
and State-based Architectures for Robot Behavior Planning
and Control
In Proceedings of 8th Workshop on Humanoid Soccer Robots, IEEE-RAS
International Conference on Humanoid Robots (Humanoids), Atlanta,
October 2013.
Max Schwarz and Sven Behnke:
Compliant
Robot
Behavior using Servo Actuator
Models identified by Iterative Learning Control
In Proceedings of 17th RoboCup International Symposium, Eindhoven,
Netherlands, June
2013.
Max Schwarz, Julio
Pastrana, Philipp Allgeuer, Michael Schreiber, Sebastian
Schueller, Marcell Missura and Sven Behnke:
Humanoid
TeenSize Open Platform NimbRo-OP
In Proceedings of 17th RoboCup International Symposium, Eindhoven,
Netherlands, June
2013.
Max Schwarz, Michael Schreiber, Sebastian Schueller, Marcell
Missura and Sven Behnke:
NimbRo-OP Humanoid
TeenSize Open Platform
In
Proceedings of 7th Workshop on Humanoid Soccer Robots, IEEE-RAS
International Conference on Humanoid Robots, Osaka, November 2012.
Michael Schreiber and Sven Behnke:
Humanoid
TeenSize Open Platform
In Projects for Promoting RoboCup, Mexico City, June 2012.
We gratefully acknowledge the support of German Research
Foundation under grant BE 2556/10.
Universität Bonn, Institute for Computer Science, Departments: I, II, III, IV, V, VI; Team NimbRo; Robotics in Bonn















{kind=link}
{kind=link}