
|
|
Our mobile manipulation robot Momaro has been specifically designed to the requirements of the DARPA Robotics Challenge. It consists of an anthropomorphic upper body on a flexible hybrid mobile base. Its locomotion concept is based on four compliant legs which end in pairs of directly driven, steerable wheels. This allows for omnidirectional driving on rugged terrain and for adjusting the height of the upper body. To overcome larger obstacles and to climb stairs, individual legs are lifted and the robot makes steps. The upper body consists of two adult-sized anthropomorphic arms with seven degrees of freedom each. The robot grippers have four individually controllable fingers with two joints each. The robot upper body can be twisted relative to the base, to extend the manipulation workspace. Momaro is equipped with a sensor head consisting of a continuously rotating 3D laser scanner, which produces a spherical field-of-view, eight RGB-D cameras with an omnidirectional field-of-view, three full HD color cameras for a panoramic operator view, and a top-down wide angle camera. In addition, the robot can sense joint positions and torques and is equipped with an inertial measurement unit. The operator station supports various 3D visualizations of the robot in its environment, panoramic and top-down video, and the interactive configuration of semi-autonomous locomotion and manipulation skills. |
12.1.2018
The paper by Tobias Klamt and Sven Behnke:
Planning Hybrid Driving-Stepping Locomotion on Multiple Levels of
Abstraction
has been accepted for IEEE International Conference on Robotics and
Automation (ICRA), Brisbane, Australia, May 2018.
[Video]
5.1.2018
The chapter by Max Schwarz, Marius Beul, David Droeschel, Tobias
Klamt, Christian Lenz, Dmytro Pavlichenko, Tobias Rodehutskors,
Michael Schreiber, Nikita Araslanov, Ivan Ivanov, Jan Razlaw,
Sebastian Schüller, David Schwarz, Angeliki Topalidou-Kyniazopoulou,
and Sven Behnke:
DRC Team NimbRo Rescue: Perception and Control for Centaur-like
Mobile Manipulation Robot Momaro
had been accepted for publication in: The Darpa Robotics Challenge
Finals: Humanoid Robots To The Rescue, Springer Tracts in Advanced
Robotics (STAR), vol. 121, pp. 145-190, 2018.
29.7.2016
The paper by Max Schwarz, Tobias Rodehutskors, David Droeschel, Marius
Beul, Michael Schreiber, Nikita Araslanov, Ivan Ivanov, Christian
Lenz, Jan Razlaw, Sebastian Schüller, David Schwarz, Angeliki
Topalidou-Kyniazopoulou, and Sven Behnke:
NimbRo Rescue: Solving Disaster-Response Tasks through Mobile
Manipulation Robot Momaro
has been accepted for publication in the Journal of Field
Robotics (JFR), Wiley.
It appeared in volume 34, issue 2, pages 400–425, March 2017.
15.1.2016
The paper by Max Schwarz, Tobias Rodehutskors, Michael Schreiber, and
Sven Behnke:
Hybrid Driving-Stepping Locomotion with the Wheeled-legged Robot
Momaro
has been accepted for presentation at the IEEE International
Conference on Robotics and Automation (ICRA), Stockholm, Sweden, to
appear May 2016.
[Video]
12.9.2015
The article by Tobias Rodehutskors, Max Schwarz, and Sven Behnke:
Intuitive Bimanual Telemanipulation under Communication
Restrictions by Immersive 3D Visualization and Motion
Tracking
has been accepted for the IEEE-RAS International Conference on
Humanoid Robots (Humanoids), Seoul, Korea, to appear November
2015.
[Video]
The
video by Sven Behnke, Max Schwarz, Tobias Rodehutskors, David Droeschel,
Michael Schreiber, Angeliki Topelidou-Kyniazopoulou, David Schwarz,
Christian Lenz, Sebastian Schüller, Jan Razlaw, Ivan Ivanov, Nikita
Araslanov, and Marius Beul:
Team NimbRo Rescue at DARPA Robotics Challenge Finals
has been accepted for the IEEE-RAS International Conference on
Humanoid Robots (Humanoids), Seoul, Korea, to appear November
2015.
6.6.2015
Our team NimbRo Rescue was the best ranked European team in the
DARPA Robotics Challenge, comming in 4th in the overall
ranking.
The robot Momaro and its operator crew solved seven of the eight
possible tasks in only 34 minutes. The challenge was won by team KAIST
from Korea, followed by team ihmc from Florida, and team Tartan Rescue
from Carnegie Mellon University.
Our robot Momaro practiced the surprise task for the final run, which is to pull a plug from one socket and to place it in another socket. It aso practiced climbing the stairs. In the run, the robot drove the car perfectly. The egres motion was stopped and the rules did not allow a second attempt of egressing the car. After opening the door, Momaro turned the valve and solved the surprise task. When traversing the debris, oue robot got stuck which resulted in overheated actuators. It was only partially possible to revieve the robot, which scored the point for the devbris task by moving a heavi piece away with its gripper and waving a good buy to the audience.
5.6.2015
Our team NimbRo Rescue did very well at the first competition day of
the DARPA Robotics Challenge Finals. The Momaro robot solved seven of
the eight tasks: driving the car, climbing out of the car, opening the
door, turning the valve, cutting a hole in a drywall,traversing
debris, and the surprise task, which was to operate a big switch. All
this was done in only 34 minutes. Our team is currently second in the
ranking, next only to team Tartan Rescue of Carnegie Mellon
University. Tomorrow, all teams will have a second run. The better of
the two will determine the final ranking.









4.6.2015
Today, our robot Momaro had a chance to practice the tasks in a
realistic rehearsal run. The test went well. We solved six out of
eight possible tasks: Driving the car, climbing out of the car,
opening the door, turning a valve, traversing debris, and finaly a
surprise task: open a cabinet door and pushing a button.








3.6.2015
DARPA gave us the opportunity to test their network, including
degradation of communication. Our robot Momaro practiced the Egress
task by climbing backwards out of the car.




2.6.2015
Our robot Momaro practiced the car task in the Garage today. The robot
was inspected and and safty procedures were clarified. DARPA made
official photos of our team and the Momaro robot.




1.6.2015
Our team NimbRo Rescue participates at the DARPA Robotics Challenge at
the Fairplex in Pomona, CA. We moved into our team garage to
re-assemblde the Momaro robot and tio setup the operator station.





1.5.2015
The late breaking result abstract Max Schwarz and Sven Behnke: Semi-autonomous Concurrent Driving-Stepping Locomotion
has been accepted for the IEEE International Conference on Robotics
and Automation (ICRA), Seattle, USA, to appear May 2015.
[Poster]

5.3.2015
Our team NimbRo Rescue is qualified to participate in the
DARPA Robotics Challenge
which will take place from June 5-6, 2015 at Fairplex in Pomona,
California.
[Press release]
3.3.2015
Our team Nimbro Rescue participates at the DRC Testbed in Charleston,
South Carolina. Here, DARPA provides four test arenas which are
similar to the ones that will be used in the finals. We operated our
robot Momaro in one of the arenas, recorded sensor data, and tested
the provided communication infrastructure.
2.2.2015
Our team NimbRo Rescue submitted qualification material for
participation at the
DARPA Robotics Challenge (DRC)
Finals, which will take place June 5-6, 2015 at the Fairplex, in
Pomona, California, USA.









Team NimbRo Rescue is based in the Autonomous Intelligent Systems Group at the Computer Science Institute of University of Bonn, Germany.
The University of Bonn is one of the leading public research universities of Germany. Its Computer Science Institute has a long tradition in robotics research, especially in the areas of mobile robotics and SLAM. Since 2008, the Autonomous Intelligent Systems (AIS) group conducts research in cognitive robotics and machine learning.
The AIS group has extensive experience in real-time perception, control, and system integration for complex robots, including robots for semi-autonomous exploration and manipulation in rough terrain, autonomous service robots capable of mobile manipulation and intuitive human-robot interaction in complex environments, and micro aerial vehicles for autonomous navigation in restricted 3D environments. We developed advanced methods for laser-based and RGB-D 3D SLAM, semantic mapping, and planning for navigation and manipulation, tool use, and robot teleoperation.
The AIS group has extensive experience in robot competitions and challenges. Our team NimbRo participated with great success at the international RoboCup competitions, winning a total of 13 tournaments, including five consecutive years of the Humanoid TeenSize soccer league and the three consecutive years of the @Home domestic service robot league. We also developed a robot for mobile manipulation in rough terrain, which participated at the DLR SpaceBot Cup. Our teams NimbRo Manipulation, NimbRo Logistics and NimbRo Copter are qualified for the European Robotics Challenges.
Our team has the necessary expertise to address the objectives of the
DARPA Robotics Challenge.
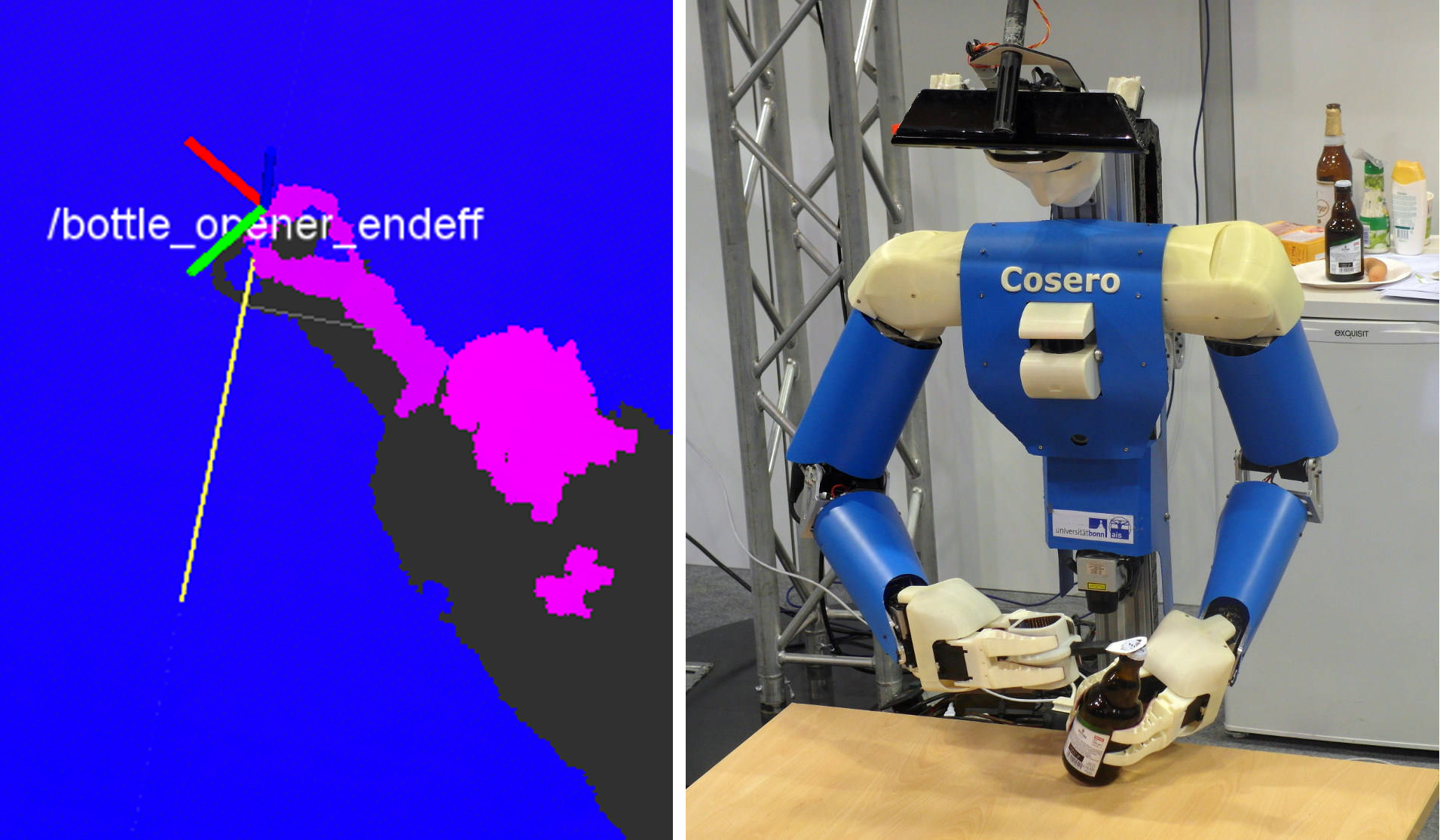
Jörg Stückler and Sven Behnke:
Adaptive Tool-Use Strategies for Anthropomorphic Service
Robots
In Proceedings of 14th IEEE-RAS International Conference on Humanoid
Robots (Humanoids), Madrid, Spain, 2014.

Jörg Stückler, Max Schwarz, Mark Schadler, Angeliki
Topalidou-Kyniazopoulou, and Sven Behnke:
NimbRo Explorer: Semi-Autonomous Exploration and Mobile
Manipulation in Rough Terrain
Journal of Field Robotics 33(4):411-430, Wiley, 2016.

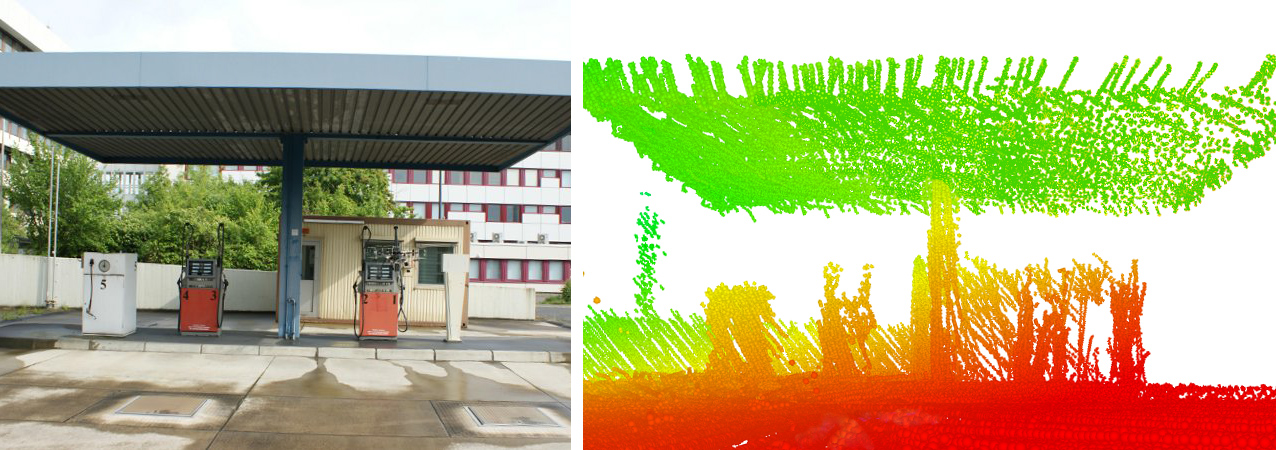
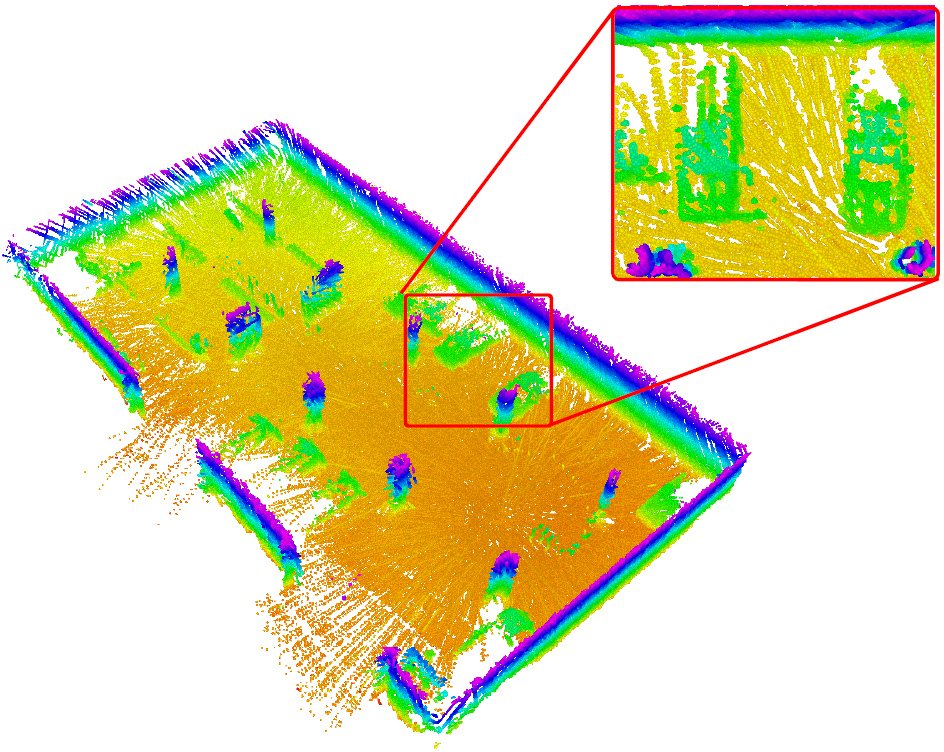
David Droeschel, Jörg Stückler, and Sven Behnke:
Local Multi-Resolution Surfel Grids for MAV Motion Estimation and
3D Mapping
In Proceedings of 13th International Conference on Intelligent
Autonomous Systems (IAS), Padova, Italy, 2014.
Universität Bonn, Institute for Computer Science, Departments: I, II, III, IV, V, VI; Team NimbRo; Robotics in Bonn
































