
Our team NimbRo scored the most total points in the Drop-in
Competition, the Technical Challenges, the Software Challenge and the
Main Soccer Tournament and, hence, won the Best Humanoid Award in the Humanoid League.
21.7.2024
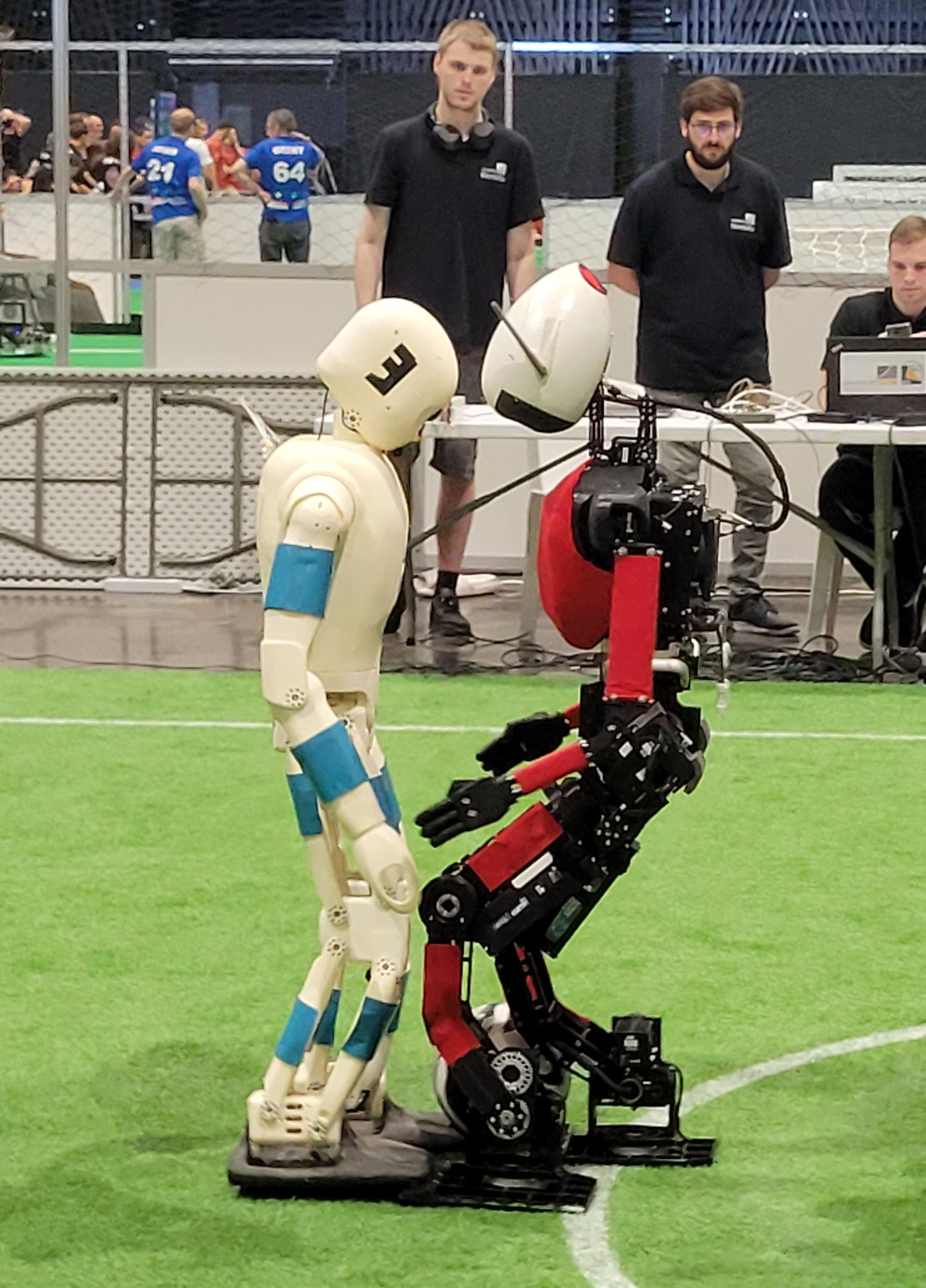
In the Final, our robots met the robots of team RoMeLa (UCLA, USA). The
RoMeLa robots were heavier and had much more powerful motors, compared
to NimbRo-OP2X. They had improved much from RoboCup 2023, could walk
fast, maintained balance when disturbed, kicked the ball hard, and
showed good soccer skills. After 3:1 at half time, the game ended 6:1
for RoMeLa. Congratulations to the UCLA team!



20.7.2024
After having difficulties with visual perception in the
round robin, our robots met Tsinghua Hephaestus from China in the
semi-final. Both teams played well, but our robots were faster and won
most 1 vs. 1 fights. After a 3:2 score at half time, the exciting match
ended 6:3 for NimbRo.



19.7.2024
In the Technical Challenges, our robots demonstrated their skills in Obstacle Navigation and Push Recovery.


18.7.2024
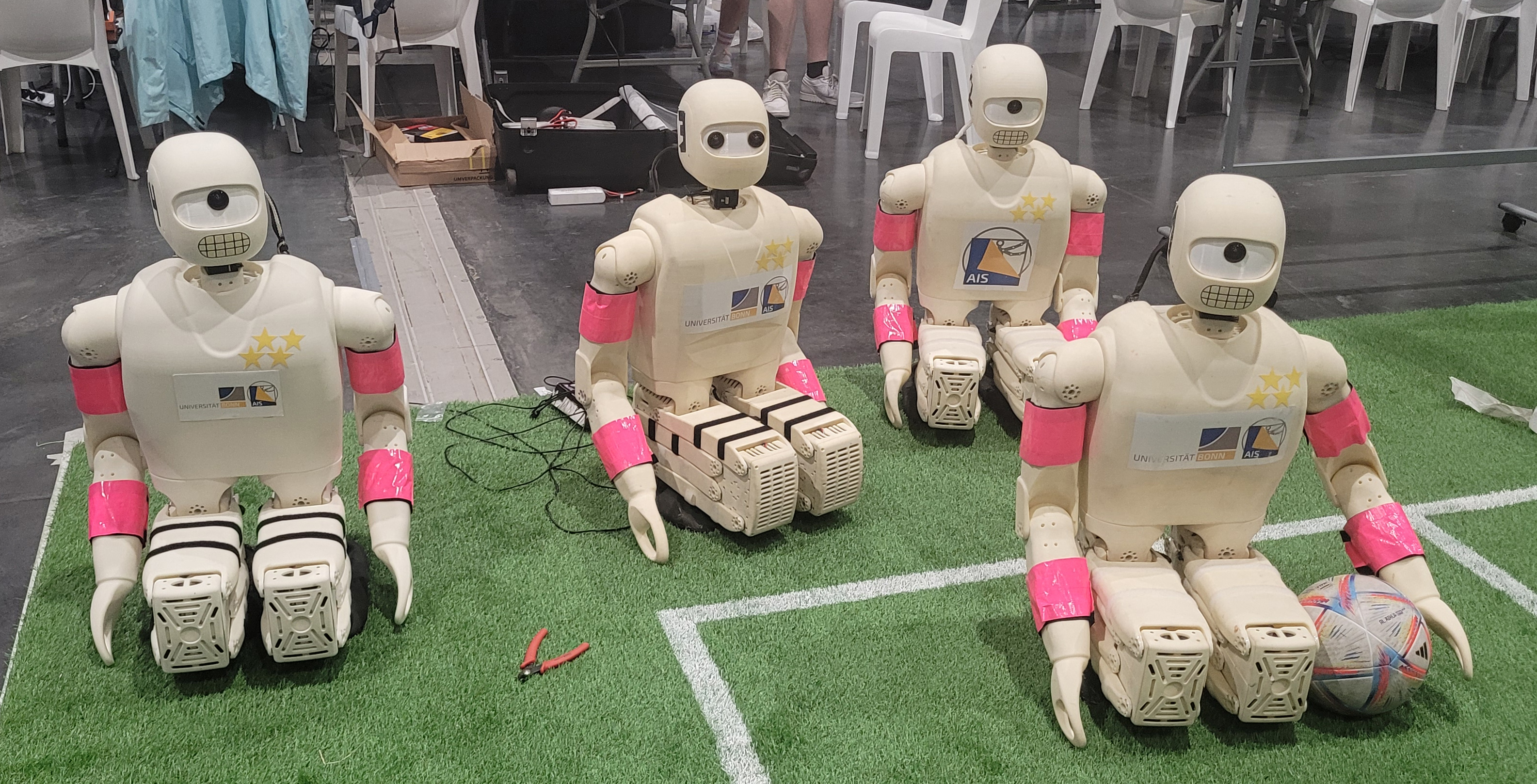
Our team participates in the Humanoid AdultSize competitions at RoboCup 2024 in Eindhoven, NL.
On the first competition day, our robots played four 3 vs. 3 Drop-In games and scored 10 goals.



At RoboCup 2023 in Bordeaux, France our NimbRo-OP2X humanoid robots won the main
Humanoid
League AdultSize soccer tournament, scoring a total of 66:0
goals.
They also clearly won the Drop-In
competition and demonstrated their skills in the Technical
Challenges.
[Press
release]
[RoboCup_2023_NimbRo_Humanoid_AdultSize_Highlights.mp4]




9.7.2023
Our robots won the final 8:0 vs. HERoEHS (Korea).





8.7.2023
Our robots clearly won their Humanoid AdultSize semifinal 10:0 vs.
RoMeLa (USA).
In the Technical Challenges, our robots kicked the ball over an obstacle, received a pass & scored, and regained balance after pushes.



7.7.2023
Our robots played today three round robin games. They scored a total of
22:0 goals. [Video]




6.7.2023
On the first competition day of #RoboCup2023, our NimbRo
soccer robots clearly won the Drop-In tournament of the Humanoid
AdultSize league. They scored 26:0 goals in four games. [Video]

4.7.2023
Our team participates at the RoboCup 2023 competition in Bordeaux,
France.

Our team NimbRo won the RoboCup 2022 Humanoid League
AdultSize soccer competition in
Bangkok, Tailand. Our robots also won the Drop-in tournament and the Technical Challenges. Consequently,
our team came in first in the overall Best-Humanoid
ranking.
[Press Release]



16.7.2022
In the Humanoid AdultSize Final, our robots met Team HERoEHS from
Korea. Our robots played very well and won almost all 1 vs. 1 fights.
They scored reliably and won the game 7:1.


15.7.2022
Our robots scored in all four Technical Challenges: Push Recovery, Goal
Kick, High Kick, and Parkour.
They also won their remaining two Round Robin games: 8:0 vs. RoMeLa,
USA, and 8:1 vs. HERoEHS, Korea.
The final will be played tomorrow vs. HERoEHS.




[Technical
Challenge Video] [HERoEHS Round Robin Video]
14.7.2022.
Our robots won their first two Round Robin games in the
main Humanoid AdultSize tournament: 7:0 vs. Team HERoEHS from Korea and
13:0 vs. Team RoMeLa, USA.




[Video]
13.7.2022
On the first competition day, our robots won the Drop-In tournament in
the Humanoid AdultSize class. In three games, they scored a total of
15:3 goals, resulting in 22 points in the Drop-In ranking. Team HERoEHS
from Korea came in second with 5.5 points and Team RoMeLa, USA came in
third.
11.7.2022
After two years without real international RoboCup competitions (due
to the Corona pandemic), our team NimbRo is happy to participate in the
RoboCup
2022 Humanoid AdultSize competions in the Bangkok International
Trade & Exhibition Centre.




Our team NimbRo won the RoboCup 2019 Humanoid
League AdultSize soccer
competition in Sydney, Australia.
Our robots also won the Drop-in
tournament and the Technical
Challenges. Consequently, our team came in first in the overall Best-Humanoid ranking. [Press
release]
Download: RoboCup_2019_Humanoid_League_AdultSize_Winner_NimbRo.mp4
7.7.2019
In the final, our robots met Sweaty of Hochschule Offenburg, as in the
last two years. The NimbRo robots played very well. They always were
going for the ball and won almost all 1 vs. 1 fights with the
Sweaty robots. By kicking without stopping, they dribbled the ball
quickly across the field and scored reliably. After 5:0 at half time,
the game ended 8:0 for NimbRo.






6.7.2019
In the semi final, our robots met team ZSTT-NTNU from Taiwan. The
NimbRo-OP2(X) robots scored reliably and won clearly 11:0.
They contributed to winning one more drop-in game and clearly won the
Humanoid AdultSize drop-in tournament with a total of 57 points,
followed by Tsinghua Hephaestus (24 points), and Sweaty (15 points).
Our robots also won the Technical Challenges (Push Recovery, Dynamic
Kick, High Jump, and High Kick) with a total score of 34 points,
followed by Tsinghua Hephaestus 28 points, and ZSTT-NTNU 9 points.
5.7.2019
On the second competition day, our robots won their two remaining
round-robin games with a total score of 13:0. They also contributed to
winning their three remaining drop-in games.



4.7.2019
Team NimbRo participates at the RoboCup 2019 Humanoid
League competitions in the AdultSize class. At the first
competition day, our robots won their two round robin games with a
total score of 16:0. They also contributed to winning their three
drop-in games.
Our team NimbRo won the RoboCup 2018 Humanoid
League AdultSize soccer
competition in Montreal, Canada.
Our robots also won the Drop-in
tournament and the Technical
Challenges. Consequently, our team came in first in the overall Best-Humanoid ranking with 116
points, followed by KidSize winner Rhoban Football Club (France, 113
points) and TeenSize winner Ichiro (India, 98 points).
Press release: [Titelverteidigung bei Roboter-WM in Kanada]
This year, for the first time, 2 vs. 2 drop-in games are played in the AdultSize class. Our team constructed a new robot, NimbRo-OP2X, which has more compute power, a new generation of actuators, and 3D printed gears, as compared to our RoboCup 2017 winner NimbRo-OP2.
RoboCup_2018_Humanoid_AdultSize_Soccer_Winner_NimbRo.mp4
21.6.2018
In the Final, our robots met Sweaty (Hochschule Offenburg, Germany) as
in 2017. Both teams had very capable robots, which often blocked each
other from kicking. Our robot NimbRo-OP2X had slight advantages in 1
vs. 1 fights, though. Consequently, after a half-time score of 1:0, the
game ended 2:0 for NimbRo.






20.6.2018
In the semi-final, our robots met Tsinghua Hephaestus (China). The
Chinese robot played very stable and kicked extremely strong, but our
robot NimbRo-OP2X was faster and had advantages in 1 vs. 1 fights.
After a half-time score of 4:1, the game ended 7:4 for NimbRo.
Our robots clearly won the quarter final of the soccer tournament
16:0 vs. CIT Brains & Team KIS (Japan).
In the Technical Challenges, our robots quickly scored a moving ball,
kicked the ball over an obstacle, withstood significant impacts from a
swinging mass, and jumped high for a short moment. Overall, they won
the Technical Challenges with 26 points, followed by Tsinghua
Hephaestus (China, 25 points) and ZSTT (Taiwan, 20 points).
Our robots also won their last drop-in game 3:1, confirming their
victory in the first Humanoid AdultSize Drop-in Tournament with a total
of 51 points, followed by Sweaty (Hochschule Offenburg, Germany) with
29 points and Tsinghua Hephaestus (China) with 5 points.









19.6.2018
Our robots won their third round robin game 6:0 vs. ZSTT (Taiwan). They
also scored 14:0 goals in two more drop-in games. Hence, NimbRo won its
round robin group with 16:0 goals from three games. NimbRo is also
leading the drop-in competition with a total of 46 points, followed by
Sweaty (20 points).




18.6.2018
Our robots won all four games of the first competition day - two
round-robin games and two drop-in games - with a total score of 18:0
goals. All three of our robots participated in the games, including the
newest NimbRo-OP2X, last-year's champion NimbRo-OP2 and our veteran
robot Copedo.




Team NimbRo wins both AdultSize and TeenSize Soccer games, Technical Challenges, Drop-in Challenge, Design Award.
30.7.2017
In the final game of the AdultSize soccer tournament our NimbRo-OP2
robot met Sweaty (Hochschule Offenburg, Germany). Both players were
capable. They walked quickly, saw the ball reliably and kicked
strongly. NimbRo had advantages in fights for the ball and maintained a
very stable balance. It scored one goal after the other. After 7:0 at
half time, the game ended early with a score of 11:1 for NimbRo.
The NimbRo-OP2 robot also received the RoboCup Design Award. Our
TeenSize robots also won their final game 2:0 vs. HuroEvolutionTN from
Taiwan.











")

29.7.2017
In the AdultSize semi-final our robots met team IRC from Iran. The
NimbRo-OP2 robot scored reliably. The half-time score was 7:0 and at a
score 9:0 we substituted it to give our second robot Copedo also a
chance to play. The game ended 9:0 for NimbRo.
Our TeenSize robots played two more round robin games: 3:0 vs.
HuroEvolutionTN (Taiwan) and 2:0 vs. AUTMan (Iran & Canada). They
came in 1st in the round robot with 25:0 goals from six games.
In the TeenSize technical challenge, our robots scored in all four
challenges: kicking the ball high, kicking a moving ball, jumping high
and, continuing to walk after being hit by a mass on a pendulum.
Our robots NimbRo-OP2 and Copedo also scored well in the AdultSize
technical challenges.
Both, the TeenSize and the AdultSize robots won the Techical Challenges
in their size class.with 34 and 15 points, repectively.
NimbRo TeenSize also won the drop-in challenge, where games were played
in randomly assigned teams.







28.7.2017
Our AdultSize robot NimbRo-OP2 met team ZSTT and won 8:0. This was the
last round robin game. NimbRo AdultSize won its group with 26:0 goals
from three games. The TeenSize robots also won their round robin games:
5:0 vs. WF Wolves & Taura Bots and 5:0 vs. T-FLOW, For the first
time, three NimbRo TeenSize robots played together in a regular game.


27.7.2017
The first goal of the RoboCup Humanoid League Soccer tournament in
Nagoya was scored by a robot of our team NimbRo TeenSize. In total, our
robot scored four goals in this drop-in game and two goals in a second
drop-in game. Our new AdultSize robot NimbRo-OP2 played its first round
robin game vs. CIT Brains from Japan very well. The game ended early
10:0 for NimbRo. Our robot also won its second round robin game 8:0 vs.
team KIS from Japan. Our TeenSize robots also won their round robin
games: 5:0 vs. aiRobots from Taiwan and 5:0 vs. team AcYut from India.




25.7.2017
Our team arrived at the RoboCup venue in Nagoya. We assembled the
robots and are setting-up the system. This year, the number of players
in the TeenSize class has been increased to 3 vs. 3, which will allow
for more team play. We also participate in the AdultSize class, where
for the first time 1 vs. 1 soccer games will be played. For this, we
constructed a 135cm tall 3D printed robot: NimbRo-OP2.


Our team NimbRo is qualified for the RoboCup 2017 Humanoid League TeenSize and AdultSize competitions in Nagoya, Japan.
3.7.2016
Our team NimbRo won the soccer
tournament of the RoboCup 2016 Humanoid TeenSize class.
The final game vs. HuroEvolutionTN (Taiwan) was dominated by our robots
Dynaped and igus Humanoid Open Platform. After a half-time score of 3:0
the game ended 9:0 for Nimbro. In total, our robots scored 29:0 goals
in five games.
Our igus Humanoid Open Platform
robot also received the First
International Harting Open-Source Award.







2.7.2016
In the semi-final, NimbRo met the 4th of the round robin: AUTMan (Iran, Canada). Again our robots played very well and won the game without difficulty 5:0.
1.7.2016
The second round robin game was played vs. HuroEvolutionTN from
Taiwan. All goals were scored in the first half, including a self-goal
of HuroEvolutionTN. The game ended 4:0 for NimbRo. In the third and
final round robin game, our robots met the joint team WF Wolves &
Taura Bo. Dynaped and the igus Humanoid Open platform scored reliably.
The game ended 5:0 for NimbRo.
After winning all thee games, NimbRo is first in the round-robin.
30.6.2016
Our robots won their first game 6:0 vs. AUTMan (Iran, Canada). Half-time score was 4:0.




28.6.2016
Our team NimbRo TeenSize arrived at Leipziger Messe and is setting up the robots for the RoboCup Humanoid League soccer competition.

30.4.2016
Our team NimbRo is qualified for the TeenSize class of the Humanoid
League for the RoboCup 2016 competition in Leipzig, Germany. After two
setup days, the tournament will start on July 30th.
Hafez Farazi, Philipp Allgeuer, Grzegorz Ficht, and Sven Behnke: NimbRo TeenSize Team
Description 2016
![]()


22.7.2015
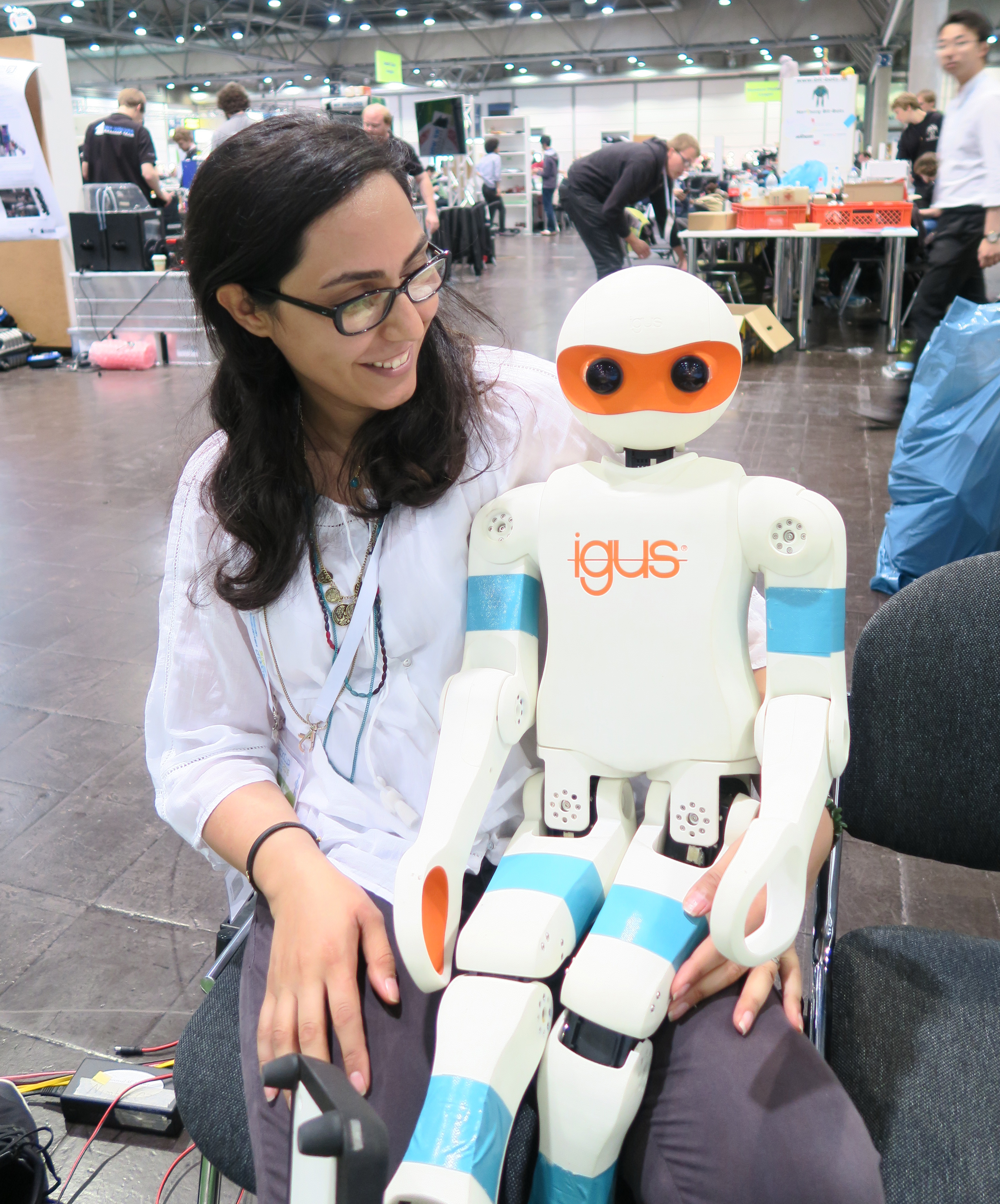
The igus® Humanoid Open Platform robot, which we develop together with
igus® GmbH, won the first RoboCup
Design Award at the RoboCup
2015 Competition in Hefei, China.
25.4.2015
Our igus Humanoid Open Platform robots are demonstrated by Philipp and Hafez at RoboCup German Open in Magdeburg.





![]()
24.7.2014
The paper by Marcell Missura and Sven Behnke: "Balanced Walking with Capture Steps" won the Best Science Paper Award at he 18th RoboCup International Symposium, Joao Pessoa, Brasil.
In the final, our robots Copedo and Dynaped met team Baset from Iran. Copedo played goalie and Dynaped, which had a new capture step feature enabled, was a field player. When struggling for the ball, robots of both sides often went down. Dynaped is not equipped to get up and had to be taken out, In these situations, the Baset robots, which got up quickly, scored. After 5:0 at half time, the game ended 8:4 for Baset.





23.7.2014
Our robots Dynaped and Copedo met team Parand (Iran) in the last round robin game. Copedeo had the field player role and scored three times. After 2:1 at half time, the game ended 3:1 for NimbRo. Both teams will meet again in the semi-final in the evening. In the technical challenge, Dynaped got points for dribbling an arbitrary colored ball.





22.7.2014
Our robots met team MU-L8 from USA. Dynaped was quick to reach the ball and scored reliably. The game ended early in the second half 10.0 for our robots. In the second game of the day, our robots met EDROM from Brasil. Dynaped scored reliably, but the second goal went into our own. Hence, the game ended in the second half 11:1 for NimbRo.




21.7.2014
Today is the first day of the round robin. Our robots Dynaped and Copedo played their first match vs. team AUT-UofM, a joint team from Iran and Canada. Dynaped was the field player and scored three times in the second half. The AUT-UofM robots also had some good actions, but did not score. Our robots did not play well in the game vs the Iranian team Baset.


17.7.2014
Our team NimbRo TeenSize participates in the RoboCup 2014 Humanoid League
competition in Joao Pessoa, Brasil.
Press
release.
7.4.2014
Our new 3D printed robot, which we are developing with igus GmbH, is
presented at Hannover Messe.
Press
release. More info...

5.4.2014
At RoboCup German Open, our robot Dynaped demonstrated improved
omnidirectional capture steps.
30.6.2013
Our soccer robots won the Humanoid TeenSize competitions at RoboCup 2013!
In the final game, they met team CIT-Brains from Japan. The Japanese team had a good start with a dangerous situation in front of the NimbRo goal. Our robot Copedo, which was used as field player, could clear the situation. Dynaped played goalie. Both robots coordinated well who was going for the ball. NimbRo had a clear advantage and scored three goals in the first half. The game ended 4:0 for NimbRo.





29.6.2013
In the semi-final, our robots Dynaped and Copedo met again team FUB-KIT (FU Berlin, Germany-Kyushu, Japan). The NimbRo robots scored reliably, yielding a final result of 8:0 (after 3:0 at half time). In the final, NimbRo will meet as in previous years team CIT-Brains from Japan.




28.6.2013
Our robots scored in the Technical Challenge. In the Throw-in Challenge, Copedo found the ball at the side line, picked it up and made a throw. Copedo and Dynaped also scored in the Double Pass Challenge. In total, our robots reached 14 of 30 possible points.




27.6.2013
Our robots played two more round robin games. First, they met team FUB-KIT, a joint team from Freie Universität Berlin and Kyushu Institute of Technology. Their lightweight robots were equipped with an innovative cable-driven mechanism, which allows to place all actuators in the hip. Copedo scored reliably, having only some problems to see the semi-transparent FUB-KIT robots. After 4:0 at half time, the game ended 6:0 for NimbRo. The second game was vs. team AcYut from India who reliably went to the ball. The game ended 5:0 for NimbRo (after 2:0 at half time). This makes NimbRo first of the round robin with 12:0 points and 20:1 goals.






26.6.2013
Our team NimbRo TeenSize participates in the Humanoid League
competitions of RoboCup 2013 in Eindhoven, Netherlands.
This year, both goals have the same color and visual landmarks on the
sideline of the field have been removed. This makes localization on the
field harder.
In the first round robin game, our robots Dynaped and Cosero met
CIT-Brains from Japan. The Japanese team seems to be the strongest
competitor in the TeenSize class. Both teams played well, went quickly
to the ball and could kick hard. The NimbRo robots were more stable and
had advantages in one vs. one fights. Consequently, they won the game
4:1 after 2:0 score at half time.
In the second game, our robots met team SIOR from Korea. In this game,
our new NimbRo-OP robot entered the tournament and scored its first
official goal. With the help of Dynaped, the game ended 7:0 for NimbRo
(after 4:0 at half time).






7.10.2012
We exhibit our new NimbRo-OP Humanoid TeenSize Open Platform robot at the IEEE-RAS International Conference on Intelligent Robots and Systems (IROS) in Vilamoura, Portugal. The specifications and sources of the robot are available here.
24.6.2012
 |
The paper J. J. Alcaraz-Jiménez, M. Missura, H.
Martínez-Barberá, and S. Behnke: Lateral Disturbance Rejection for the Nao Robot received the Best Paper Award of the RoboCup Symposium 2012 |
23.6.2012
Our team NimbRo won the TeenSize soccer competition, technical challenge, and received the Louis Vuitton Best Humanoid Award.
In the final, our robots met the team CIT Brains from Japan. Both teams already played the final 2010 in Singapore. It was a very exciting game where both teams played with two capable field players and no goalie. In the first half, the NimbRo robots were not going for the ball enough. The game was open, which is reflected by the score of 2:2 at half time. After a programming adjustment during the break, the NimbRo robots Copedo and Dynaped had an advantage in the second half. They scored four more goals while the Japanese robots scored only once. The game ended 6:3 for NimbRo. After the competition, our robots were elected for the Louis Vuitton Best Humanoid Award by the 30 team leaders of the entire Humanoid League.






22.6.2012
Our soccer robots did the Technical Challenges very well. Dynaped
learned a new ball and dribbled it through six obstacles and into the
goal. Copedo picked up a ball outside the field and threw it in, across
the entire field. Both robots passed the ball four times back and forth
between obstacles and scored at the end of the Double-pass Challenge.
Together, this gave a perfect score of 30 points for the Technical
Challenges.
In the semi-final, our robots met again team SHAYAN. The Iranian team
improved there robot a lot, such that frequently two opponents
were at the ball. After clearing these situations, our robots
Dynaped (first half) and Copedo (second) half scored reliably. The game
ended 6:0 for NimbRo after 3:0 at half time.
In the evening, a 3 vs. 3 demonstration game was played. Our three
robots played vs. robots of the three other teams.






21.6.2012
In the last round robin game, our robots met team DARwIn-XOS from USA. Both teams played with only one robot -- we used Dynaped in the first half and Copedo in the second half. Because there were some interruptions our robots scored only nine goals. With 9:0 points and 23:0 goals, NimbRo wins the round robin.



20.6.2012
We participate at RoboCup 2012
in Mexico City in the Humanoid League TeenSize competition with the
robots Dynaped, Copedo, and Bodo.
In the first round robin game, our robots met the team SHAYRAN from
Iran. After some diffuculties that our robots had in the first half,
Dypaped scored reliably in the second half and the game ended early
10:0 for NimbRo.
In the afternoon, our robots met the team CIT Brains from Japan in the
second round robin game. Both teams had technical difficulties with
their robots. While the japanese field player quickly approached the
ball and also kicked it towards our goal, the NimbrRo robots still
had an advantage. After 3:0 at half time, the game ended 4:0 for NimbRo.





![]() We gratefully acknowledge financial support of Igus GmbH for the participation at
RoboCup 2012.
We gratefully acknowledge financial support of Igus GmbH for the participation at
RoboCup 2012.
10.7.2011
We won the 2011 Humanoid Soccer TeenSize tournament.
In the TeenSize final, our robots Dynaped and Bodo met the team
KMUTT from Thailand. The Taiwanese team had a good defense.
Nevertheless, the score was 6:0 at half time. The game ended early at a
score of 10:0 for our team.




9.7.2011
Our robots continued with round robin games and met again team KMUTT from Thailand. They improved their play. In particular, the KMUTT goalie jumped reliably and saved many goals. Hence, the result was only 8:0 for our team. The second game vs. AcYut 4 from India was won by our robots 10:0.

")


8.7.2011
Our robots had to show their skills in the technical challenge. Dynaped dribbled the ball sucessfully between multiple obstacles. Together with Bodo, it completed the Double Pass Challenge half way.
7.7.2011
In the TeenSize soccer round robin, our robots Dynaped and Bodo won the first game 9:0 vs. KMUTT from Thailand. Our team also won the second game vs. AcYut 4 from India 10:0.



6.7.2011 Our team NimbRo participates at RoboCup 2011, which takes place at the Expo Center in Istanbul.
Information about earlier tournaments can be found here.
University of Bonn, Institute for Computer Science, Computer Science VI - Intelligent Systems and Robotics Imprint Data Privacy Statement ;Team NimbRo; Robotics



















