
In May 2023 we purchased a TIAGo++ from PAL Robotics and equipped it with additional sensors and a strong onbord computer.

Our cognitive
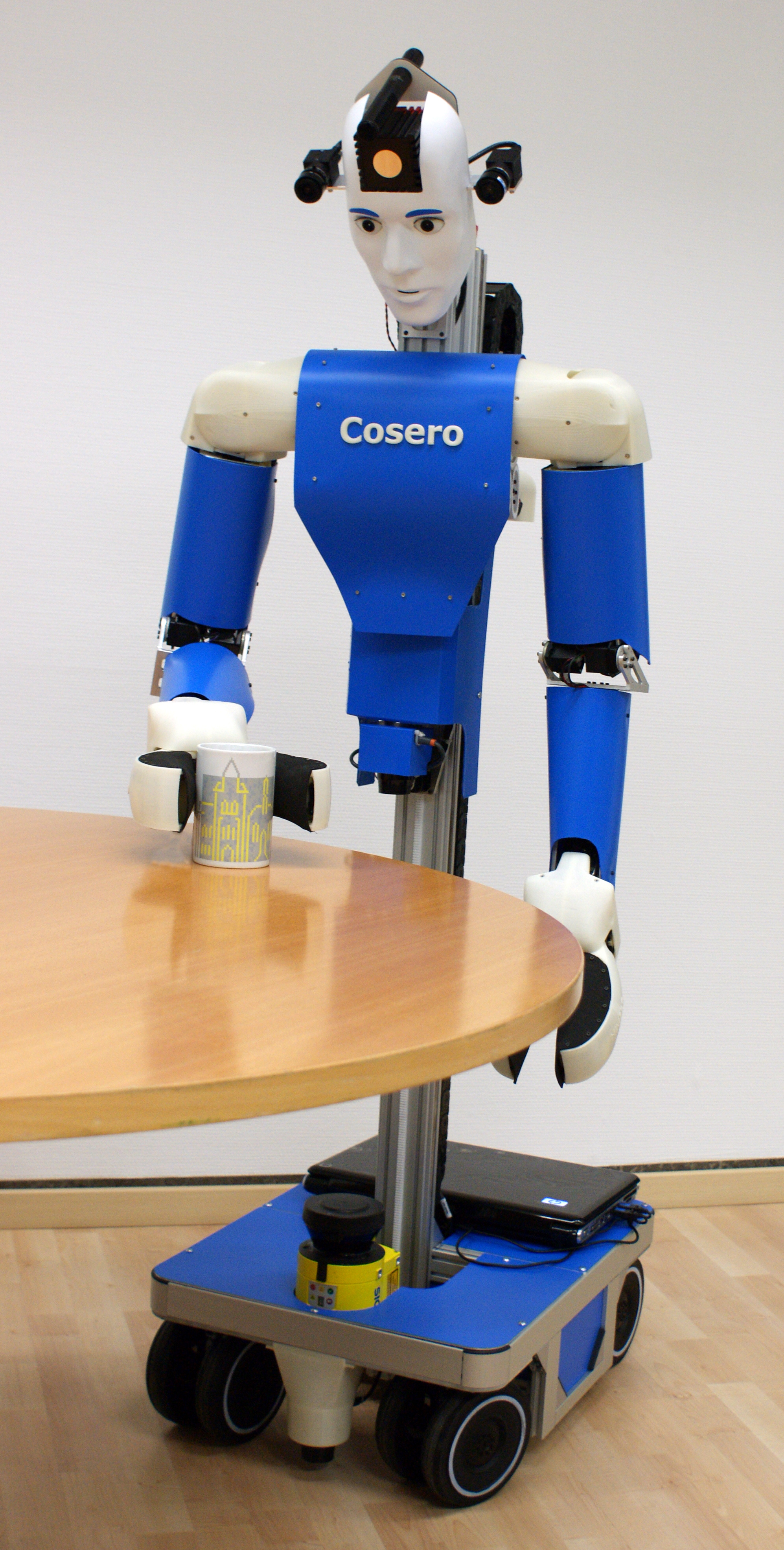
service robot Cosero became operational in
Fall 2010. Cosero has an eight-wheeled omnidirectional base (12 DOF), a
movable trunk (2 DOF), two anthropomorphic arms (7 DOF each), and a
movable sensor head (2 DOF). Its arms are twice as strong as the ones
of Dynamaid.
The robot is equipped with four laser-range-finders, a Time-of-flight
camera, two color cameras, and a directional microphone.



Our domestic service robot Dynamaid was constructed for the RoboCup
2009 @Home competition, which took place in Graz.
Dynamaid has an eight-wheeled omnidirectional base (12 DOF), a movable
trunk (2 DOF), two anthropomorphic arms (7 DOF each), and a movable
sensor head (2 DOF).
The robot base has four individually steerable axes. It can move
omnidirectionally.
The base uses eight Dynamixel EX-106 to drive the wheels. Each pair of
wheels is attached to the main plate using a Dynamixel RX-64 actuator.
The base is equipped with a Sick S300 laser-range-scanner and a Lenovo
X200 subnotebook.
Its maximum payload is 20kg. Maximal speed is 0.5m/s.
It is able to map indoor environments, to plan global paths, and to
avoid obstacles.
The antropomorphic arm has 7 joints, which are driven by Dynamixel
actuators.
The arm is equipped with a 2DOF gripper.
Its maximal payload is 1kg.
The arm is controlled using inverse kinematics. The redundancy is
resolved using nullspace optimization.
The sensor head contains two FireWire-800 color cameras, a MESA
SR4000 time-of-flight camera, and a directional microphone.
The trunk is also equipped with a movable laser scanner.
Together with Robotinho, Dynamaid won the innovation award. Our
team Nimbro@Home came in third in the overall ranking.
We also reached the second place in the @Home league of RoboCup German
Open.



Our humanoid robot Robotinho has been originally developed for the
RoboCup Humanoid League TeenSize class.
For intuitive multimodal communication with humans, it has been
equipped with an expressive head, movable cameras, a laser scanner, and
ultrasonic distance sensors.
The robot has 40 DOF: 25 DOF in the body and 15 DOF in the head.
Robotinho is 110cm tall and weights about 6kg.
The robot's name was chosen in a public vote organized by ZDF.
Robotinho participated in the TeenSize class of the Humanoid
League at RoboCup 2006 in Bremen, where it reached the Penalty Kick
final.
Robotinho conducted The 12
Chellists of The Berlin Philharmonic in the Q110.
It demonstrated its communcation skills in multiple lab
demos.

The robot base has four individually steerable axes. It can move
omnidirectionally.
The base uses four Roomba 530 as drive units. Each drive unit is
attached to the main plate using a Dynamixel RX-64 actuator.
The base is equipped with a Sick S300 laser-range-scanner and a Lenovo
X200 subnotebook.
Its maximum payload is 20kg. Maximal speed is 0.5m/s.
It is able to map indoor environments, to plan global paths, and to
avoid obstacles.




{kind=link}