|
NimbRo ROS Soccer Package
|
|
NimbRo ROS Soccer Package
|
After installation, you can test the software by using it with Gazebo. Only a few steps are necessary in order to simulate a robot. We have simplified the process to launching only two launch-files.
Before that, please set-up your system variables in each respective terminal by using the nimbro set command:
or set it globally by adding these lines to your bashrc:
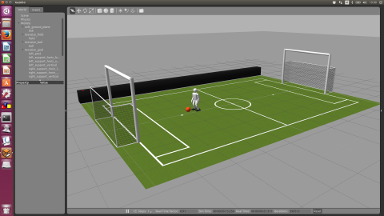
After these steps, you should be able to see the robot like in the screenshot below:
| 
|
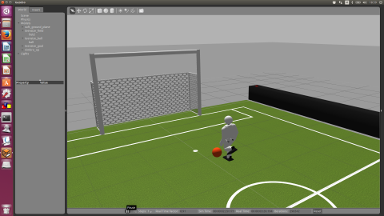
To control the robot, use a USB joystick. The basic functions are:
As a simple test press button 1, then button 2. The robot should start walking in place. At this point you can control the left and right axis to move the robot. To stop walking, press button 2 again. If the robot falls down, it will get up by playing one of the predesigned getup motions. It is important to note, that depending on your computers performance, the simulation results may vary, as gazebo requires a lot of computing resources.
 1.8.6
1.8.6 
