
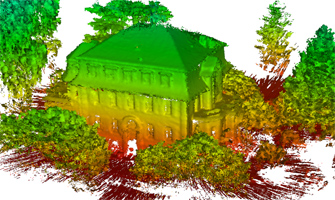
We developed 3D laser-based mapping and localization (SLAM) for micro aerial vehicles and ground robots.


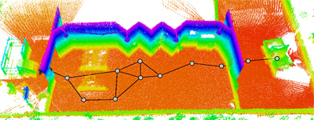
3D SLAM was used, e.g., for our mobile manipulation robot Momaro in the DARPA Robotics Challenge and in the DLR SpaceBot Cup.
University of Bonn, Institute for Computer Science, Computer Science VI - Intelligent Systems and Robotics Imprint Data Privacy Statement