

Description:
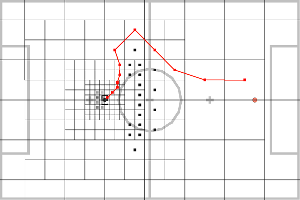
In our paper Multiresolution Path Planning in Dynamic Environments for the Standard Platform League we describe two approaches to path planning on the Nao robot. Both have in common, that they allow real-time planning on platforms with low computational resources. This is achieved by a decreasing resolution with increasing distance to the robot.
Accompanying our paper, we release both planning algorithms as modules for the SPL-Framework released by the B-Human team in 2010. The framework can be found on their website [B-Human.de].
To integrate the modules into the framework, follow the instructions given in the README file.
Download:
Citation:
If you use our modules, please cite:
| [1] | Ricarda Steffens, Matthias Nieuwenhuisen, and Sven Behnke, "Multiresolution Path Planning in Dynamic Environments for the Standard Platform League," In Proceedings of The Fifth Workshop on Humanoid Soccer Robots at Humanoids 2010, Nashville, TN, December 2010 [Download PDF] |
Last updated: December 17, 2010 by Matthias Nieuwenhuisen (nieuwenh _at_ ais.uni-bonn.de)
University of Bonn, Institute for Computer Science, Departments: I, II, III, IV, V, VI