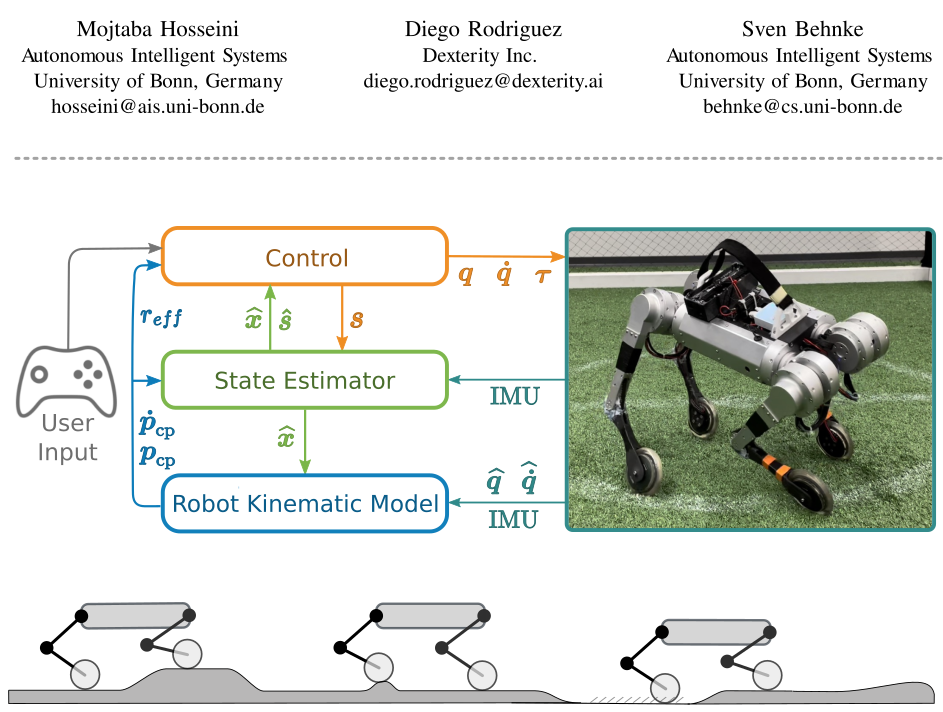
State Estimation for Hybrid Locomotion of Driving-Stepping Quadrupeds
Fast and versatile locomotion can be achieved with wheeled quadruped robots that drive quickly on flat terrain, but are also able to overcome challenging terrain by adapting their body pose and by making steps. In this paper, we present a state estimation approach for four-legged robots with non-steerable wheels that enables hybrid driving-stepping locomotion capabilities. We formulate a Kalman Filter (KF) for state estimation that integrates driven wheels into the filter equations and estimates the robot state (position and velocity) as well as the contribution of driving with wheels to the above state. Our estimation approach allows us to use the control framework of the Mini Cheetah quadruped robot with minor modifications. We tested our approach on this robot that we augmented with actively driven wheels in simulation and in the real world.
Published, available online: PDF, arxiv


Best Paper Award
Best paper award winner at 6th IEEE International Robotic Computing (IRC 2022).
December 5 - 7, 2022, Naples, Italy