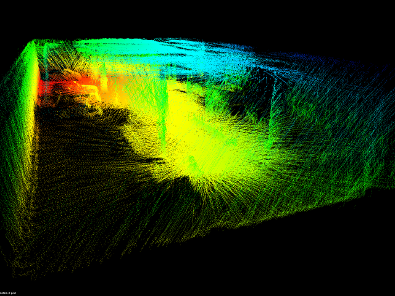
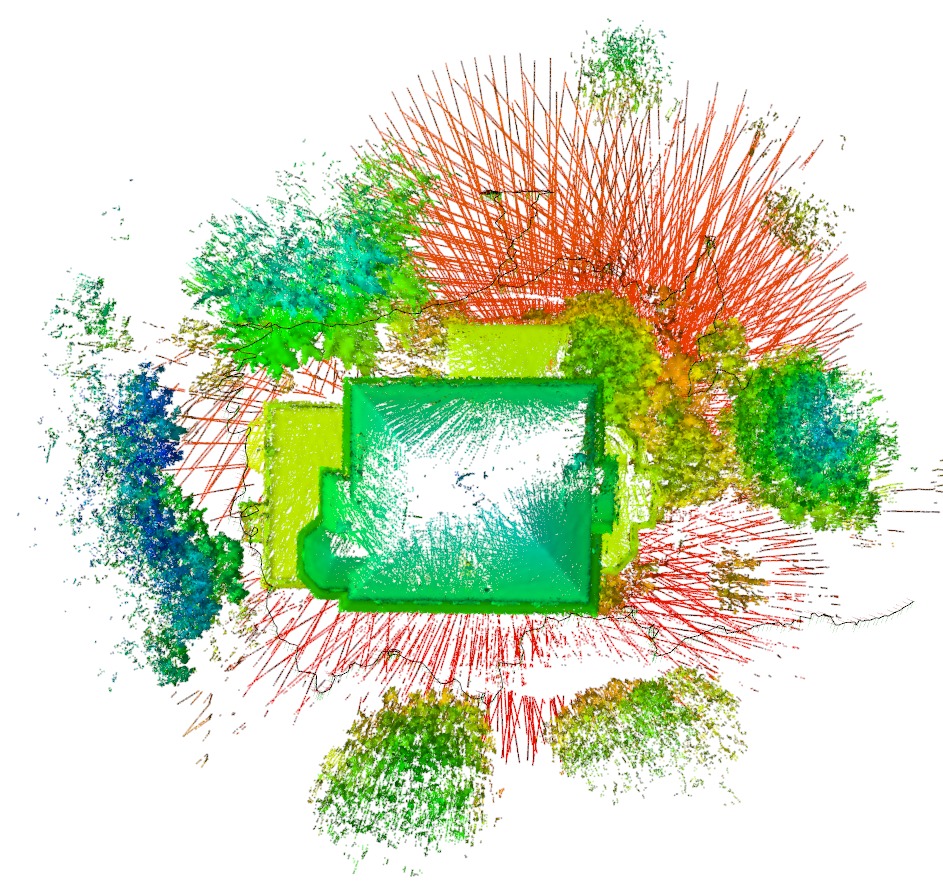
3D Laser-based Mapping with Micro Aerial Vehicles
Warehouse
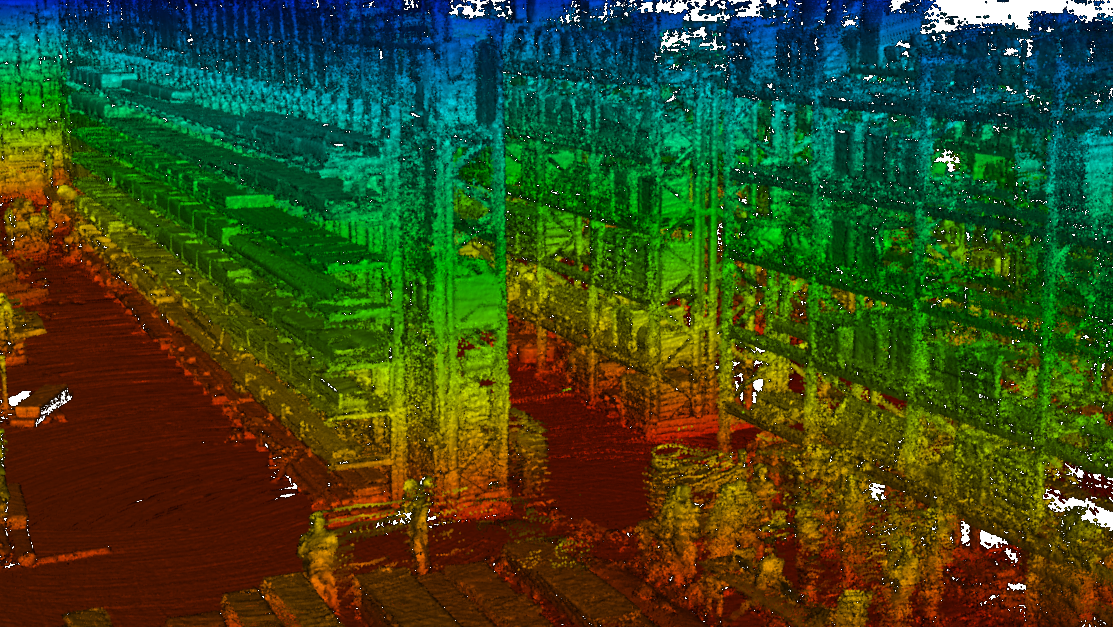
The dataset was recorded by a MAV equipped with a 3D laser scanner
in a warehouse.
warehouse.pcd
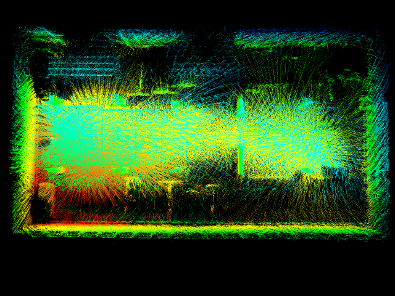
Spacebot Arena
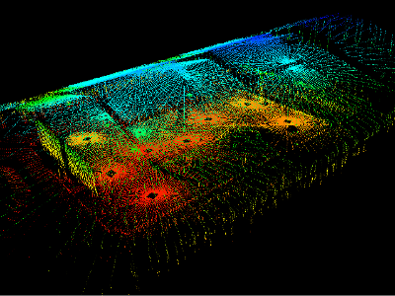
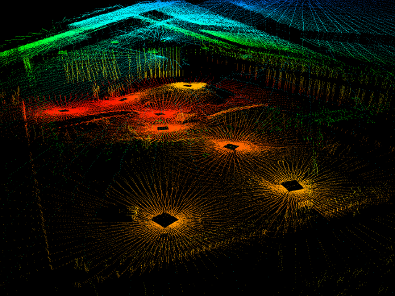
Recorded by a ground robot. The dataset contains dense point clouds and
thinned out version with different angles between laser range scans.
scans_pcd_complete.tar.bz2
Detailed results
Parking Garage
The dataset was recorded by a MAV equipped with a 3D laser scanner
in a parking garage at the Computer Science Department VI at the
University of Bonn.
garage_pcd_complete.tar.bz2
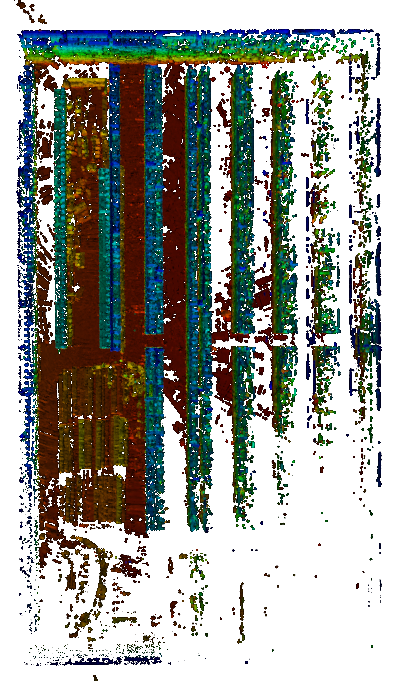
Frankenforst Facade
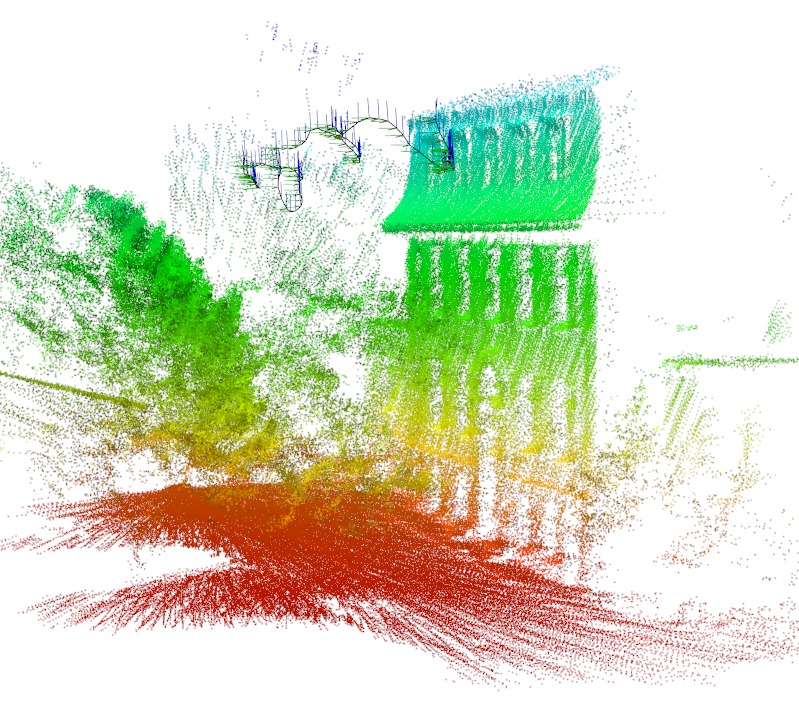
The dataset was recorded by a MAV equipped with a 3D laser scanner
at Gut Frankenforst, a research station operated by the Institute
for Veterinary Research at the University of Bonn.
It contains measurements of the front facade.
frankenforst_facade_pcd.tar.bz2
terr_gt_80.pcd (ground truth 3D map)
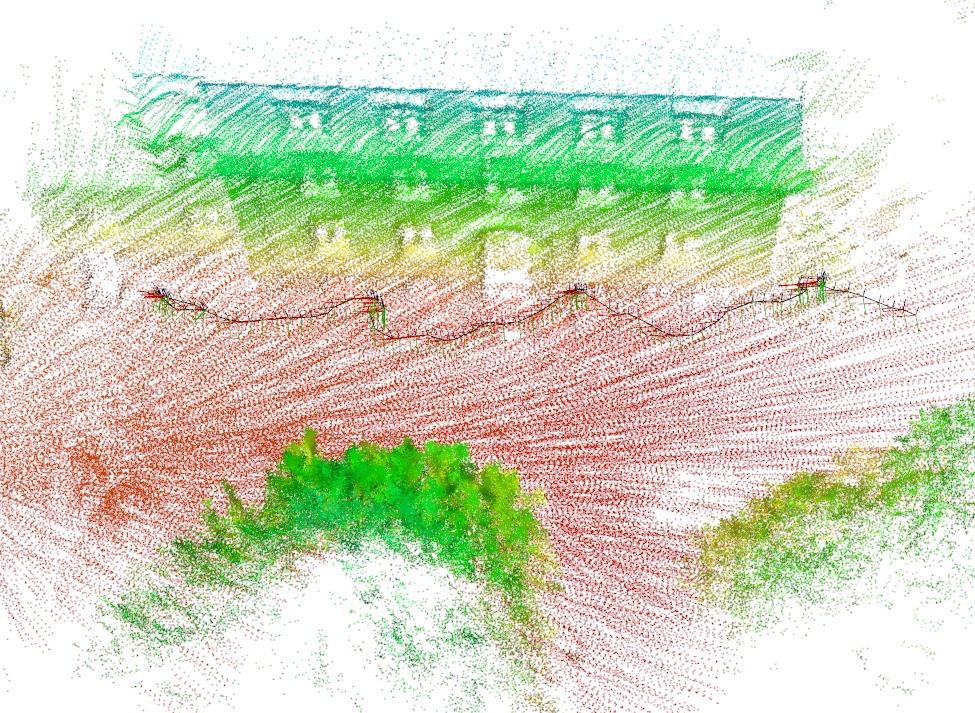
Frankenforst Building
The dataset was recorded by a MAV equipped with a 3D laser scanner
at Gut Frankenforst, a research station operated by the Institute
for Veterinary Research at the University of Bonn.
It contains measurements of the complete building.
frankenforst_building_pcd.tar.bz2
terr_gt_80.pcd (ground truth 3D map)
Motion Capture Indoor Dataset
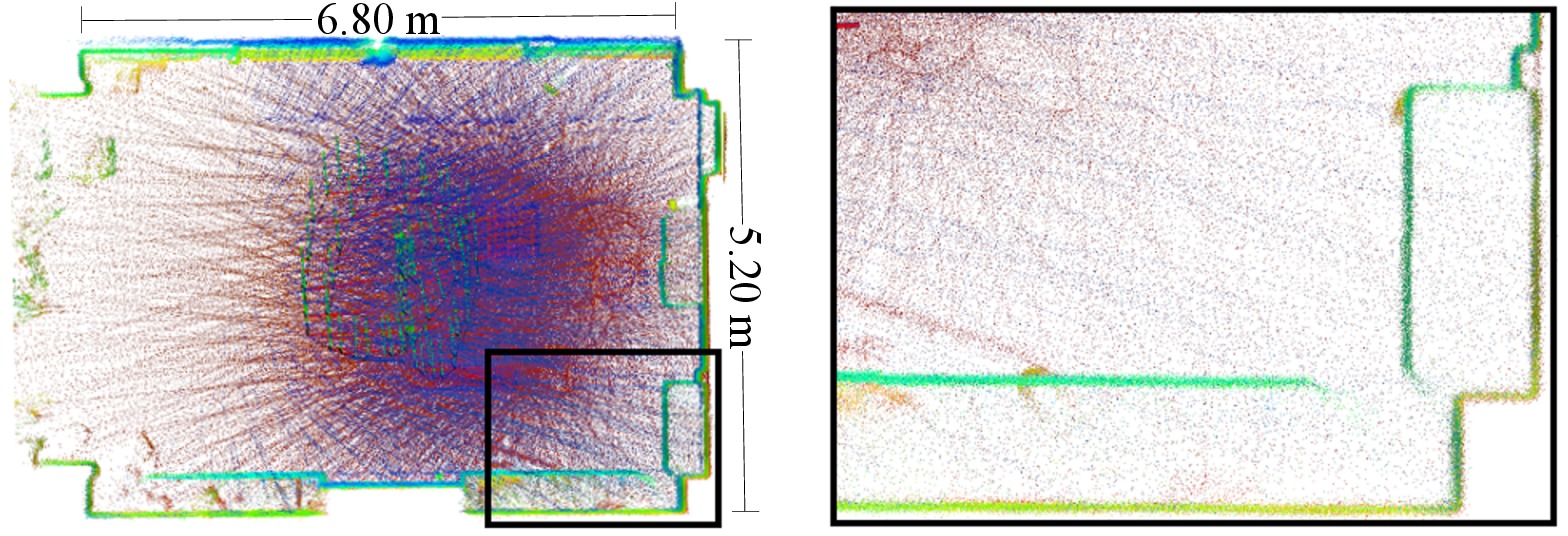
The dataset was recorded by a MAV equipped with a 3D laser scanner
in an indoor environment with motion capture system.
mocap_testing_pcd.tar.bz2
trajectory_mocap.txt (ground truth trajectory)
timestamps_mocap.txt (association of .pcds to trajectory)
mocap_gt.pcd(ground truth 3D map)